MT化にあたり、不要なものはすべて撤去したいのですが、ATコンピュータはNCスピードセンサからの信号をパルスに変換してEPSユニットに入力しています。
EPSユニットは、メインのスピードセンサ(VSS1)からの車速信号と、パワステ制御用に設けられたリングギヤの歯数をカウントするNCスピードセンサ(VSS2)からの信号を比較してパワステの制御を行っています。
NCスピードセンサ(VSS2)の信号は補助的なものですが、信号が途絶えるとエラーと判定されてEPSチェックランプが点灯し、エンジン再始動後はパワステが効かなくなります。
もし、メインのスピードセンサ(VSS1)とATコンピュータを経由して出力されるNCスピードセンサ(VSS2)のパルスが同じ仕様であれば、VSS1からのパルスを2分岐してEPSユニットに入力することで解決でます。
そこで、両者のパルスをオシロスコープで比較してみました。
- PCに接続するタイプのオシロスコープを使用しました。
この製品は自作キットですが、1時間位で製作できるし、PC接続タイプとしてはリーズナブルです。
購入したのは「紙ヒコーキ」というサイトで、現在は コッキーネットopen_in_new という名称になっています。

PCに接続するタイプのオシロスコープを使用
ATコンピュータとVSS1からの出力波形比較
- 上段がATコンピュータからの出力波形で下段がメインスピードセンサからの出力波形です。
メイン1パルスに対してATコンピュータが7パルス位になっていました。
メインの信号を分岐して使用する場合は7倍のパルスに変換する必要があり現実的ではありません。
NCスピードセンサの出力波形
- 続いてNCスピードセンサからの信号を検証しました。正弦波の波形が出ています(低速走行での検証で振れ幅は±25V以上)。
NCスピードセンサを使用する場合、この正弦波を4.5Vのパルスに変換しないといけません。
MT車にもオプションでパワステが装着できるようになった110型以降では、MT車にパワステを追加した場合、NCスピードセンサーの出力をパルスに変換するためのパルスユニットが付いてています。 このパルスユニットを使用するのが一番簡単な方法なのですが、他の方法を模索してみることにしました。
| 部品番号 | 部品名称 | 単価 | 備考 |
|---|---|---|---|
| 39985-SL0-951 | パルサーユニツト | 14,100 | 2010年12月時点 |
NCスピードセンサから出力される±25V以上の正弦波を+5Vのパルスに変換するためには、 ツェナーダイオードを使用した定電圧回路で0V以下と5V以上をカットするという方法があります。
- しかし、スピードセンサからの正弦波は、低速だと微弱な電圧で波の幅が広く、速度が高まるにつれて電圧が高まり波の幅が狭くなるという特性があるため、 0V以下と5V以上をカットしただけでは信号として認識できない可能性があり、対策が必要です。 そこで、入力が正の電圧に転じると5Vを出力するコンパレータ(オペアンプの仲間)を使用します。
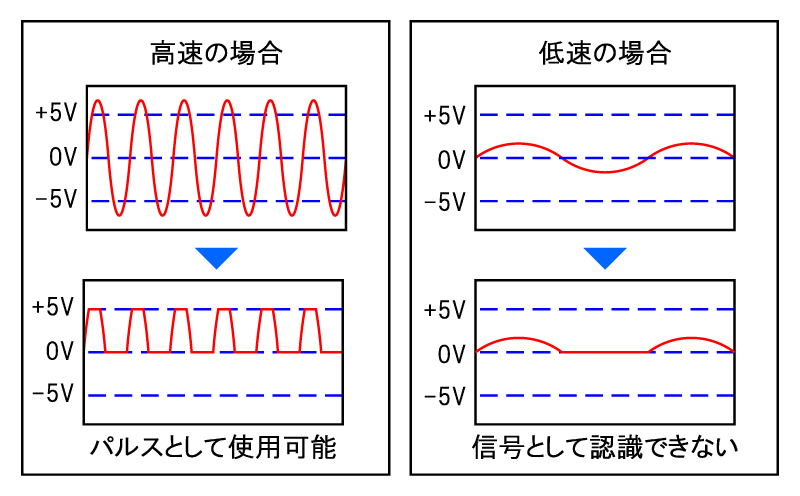
低速時と高速時の正弦波の違い
必要な部品は電子部品通販でよく知られている RSコンポーネンツopen_in_new と 秋月電子通商open_in_new で購入しました。
※ 1個単位では購入できない部品もあります。
| 名称 | 仕様 | 単価 |
|---|---|---|
| ポリスイッチ | RXEF07 0.75A | 43 |
| ショットキーバリアダイオード | SB160-E3/54 1A 60V | 15 |
| ツェナーダイオード | BZX79-C4V7 4.7V 500mW | 10 |
| セラミックコンデンサ | 50V 100000pF | 60 |
| アルミ電解コンデンサ | 105℃ 25V 470uF | 70 |
| アルミ電解コンデンサ | 85℃ 25V 10uF | 20 |
| ポテンショメータ | CT-6EP 10kΩ 0.5W 10KΩ | 150 |
| トランジスタ | 2SC1815-Y(F) NPN | 14 |
| 3端子レギュレータ | NJM7805FA 5.0V 1.5A | 90 |
| オペアンプ | LMC6482 | 186 |
| カーボン抵抗 | 1/4W 1kΩ | 1 |
| カーボン抵抗 | 1/4W 10kΩ | 1 |
| カーボン抵抗 | 1/4W 4.7kΩ | 1 |
| 合計 | \661 | |
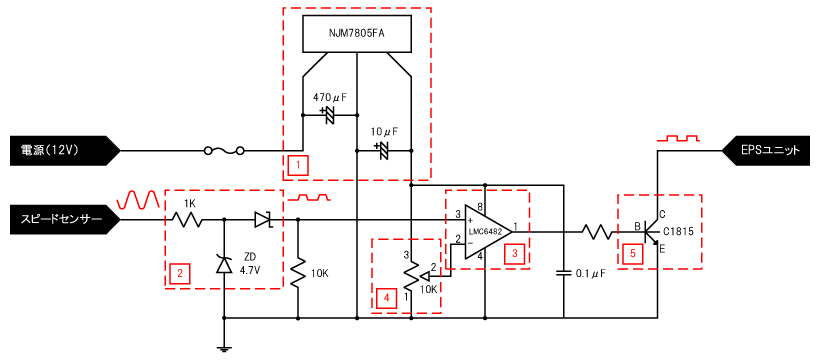
1
3端子レギュレータによる電源降圧回路
3端子レギュレータを使用して12Vから回路用電源の5Vに降圧します。入力側に平滑用、出力側に安定用のコンデンサを入れる必要があります。
コンデンサは、実装サイズ優先で入力側を470uF、出力側を10uFを選定(ネット情報では、入力側に470~1000uF、出力側に10~100uF)。
発振防止用コンデンサは入れなくても発振する事はなかったので省略(ネット情報では、0.1~0.3μFの搭載推奨)。
2
ツェナーダイオードを使用した定電圧回路
入力に対して反対方向にダイオードを繋ぎ、ダイオードの降伏電圧を利用する定電圧回路です。
降伏電圧(今回は4.7V)までは普通に電気が流れ、4.7Vを超えた時にダイオードが降伏状態となり、アース側に電気が流れます。
さらにショットキーバリアダイオードでプラス側のみを整流し、正弦波の0V以下と4.7V以上をカットします。
3
コンパレータによる増幅回路
入力が 0V をわずかに超えると 5V 出力を得られるように、基準電圧を 0V 付近に設定したコンパレータ(LMC6482)を使用します。
これで低回転で電圧が低い時でもキッチリ5Vを出力してくれます。
4
コンパレータのヒステリシス調整回路
入力が0Vを超えた瞬間にコンパレータからの出力がHiになってしまうと、微妙なノイズでも反応してしまうので、
ポテンショメータを用いたしきい値設定回路で反応する最低電圧を調整できるようにします。
5
トランジスタを使用したスイッチング回路
コンパレータの出力は5Vが立ち上がるまでに少し時間が必要で、オシロで見ると台形のような波形となってしまいます。
トランジスタを使用して増幅する事で、垂直に立ち上がるパルスに調整します。
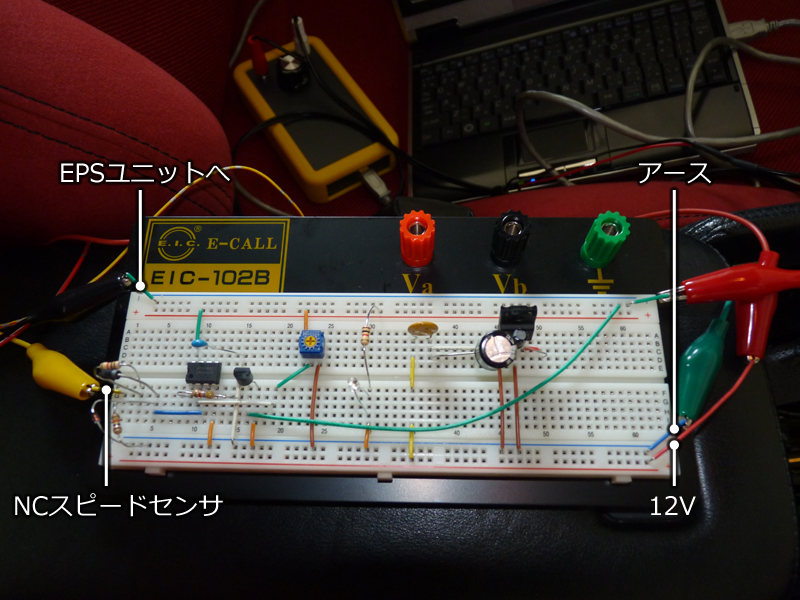
ブレットボードで試作回路をテスト
- 回路をブレットボードで試作。ブレットボードとは電子部品を挿すだけで回路が作れる試作用のツールです。
NCスピードセンサからの入力、EPSユニットへの出力、電源(12V)、アースを接続します。
NCスピードセンサのもう一本の線はアースに接続しました。
エンジンを始動して試運転してみると、あっけなくEPSエラーは起きず問題なく使用できました。
- オシロで波形も確認しましたが、想定通りの結果で問題ないようです。
今回使用したオペアンプは入力しきい値が約0.2Vのため、時速5km未満の超低速域では信号を検出できません。 これに対して純正ATコントロールユニットは、超低速域でもパルス出力が得られます。 EPSユニットをエラーなく動作させるという点に関しては問題ないようですが、今後改善したい点でもあります(しかし素人なのでどうすれば良いか分からない・・・)。
正弦波→パルス変換 試作回路 出力波形

正弦波→パルス変換基板 実装レイアウト
- 実装する為回路をユニバーサル基板に組みます。
色々考えて、一番コンパクトになるレイアウトを考えてみました。
ポテンショメータはコンパレータのヒステリシス調整(※)のために使用するつもりで実装しましたが、そもそもオペアンプが0.2V以上でないと認識しないので、意味のない部品になってしまいました。
※ 0Vを超えた瞬間に出力がHiになってしまうと、微妙なノイズでも反応してしまうので、反応する最低電圧を調整することです。

プラボックスに収納した実装基板
- 基板がそのままだとショートが怖いので、その辺にあったプラボックスを加工して収納しました。
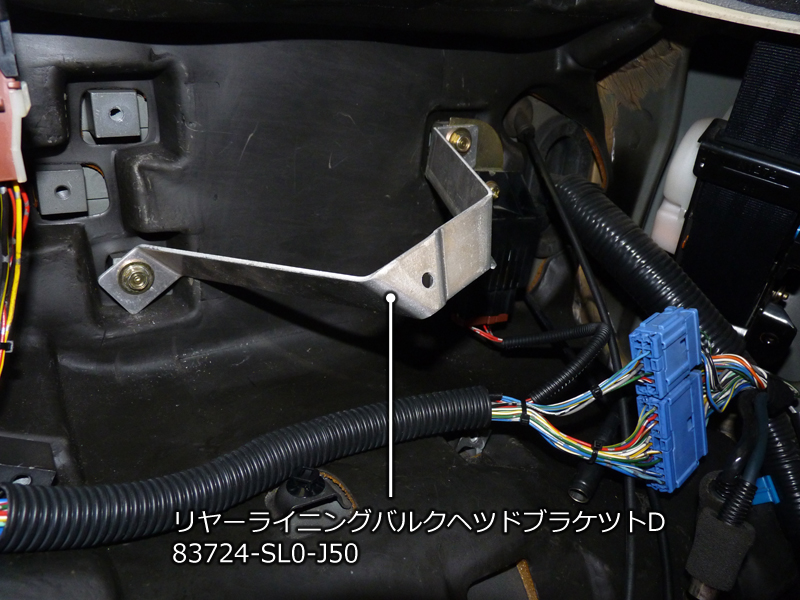
NSX-R専用ブラケツト(83724-SL0-J50)取り付け後
- TRCユニットには内装パネルの固定クリップがはまるブラケットが付いているので、ユニットを撤去するクリップの内ひとつが固定ができなくなります。
TRCユニットとATコントロールユニットがないNSX-Rには専用のブラケットがあるので、そのブラケットを取り付けて完了。見た目もかなりすっきりしました。
TRCユニットを撤去した時に付けたかったのですが、ATコントロールユニットも撤去しないと取り付けができないため、撤去完了まで保管していました。
| 部品番号 | 部品名称 | 単価 |
|---|---|---|
| 83724-SL0-J50 | ブラケツトD,リヤーライニングバルクヘツド | 4,200 |
価格は2025年04月時点
Visioでパターン設計
- せっかくなので、完全な製品にしたいと思い、銅張積層板をCNCで切削してオリジナル基板を製作してみることにしました。
まずはVisioを使用して切削図を設計。パターンの幅は1mmにしました。
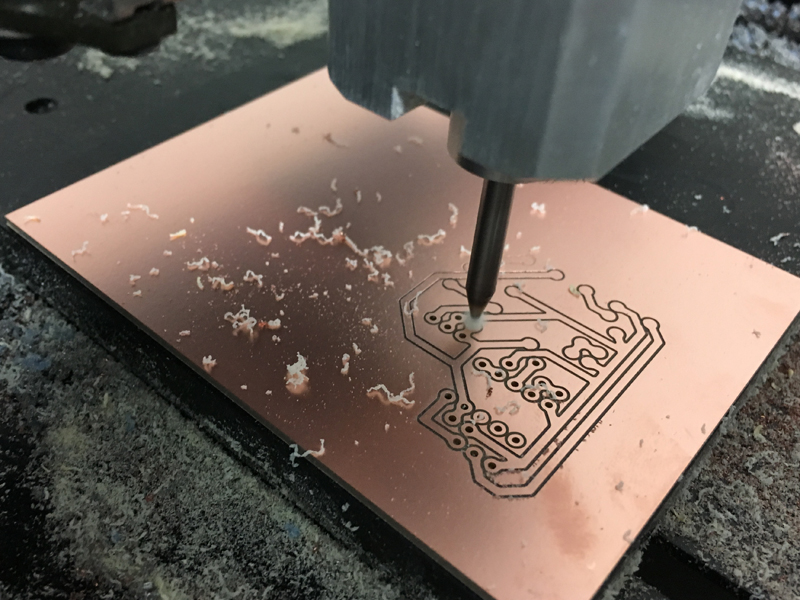
CNCで基板のパターンを切削
- CNCで切削。
「パターン切削」→「穴開け」→「外形切り抜き」の3工程に分けて切削を行いました。
エンドミルはφ0.4を使用しています。
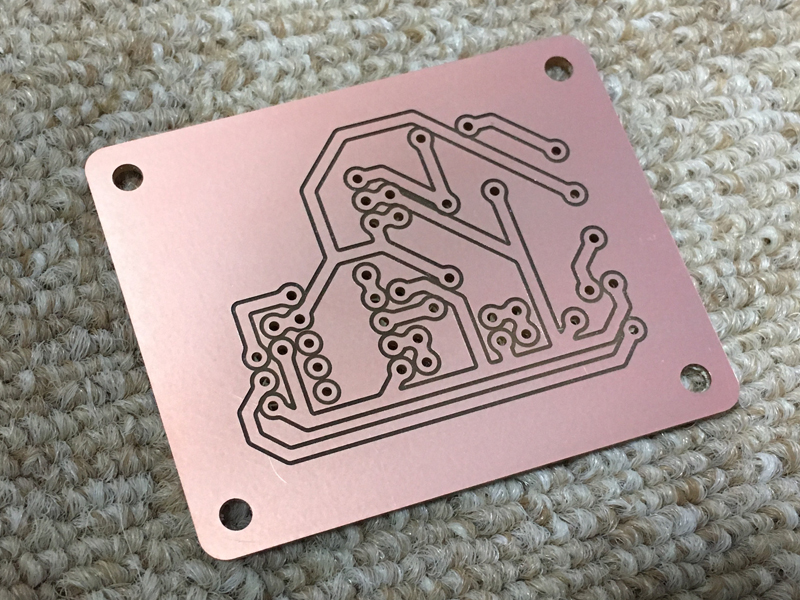
できあがった基板
- できあがった基板。それっぽく仕上がりました。
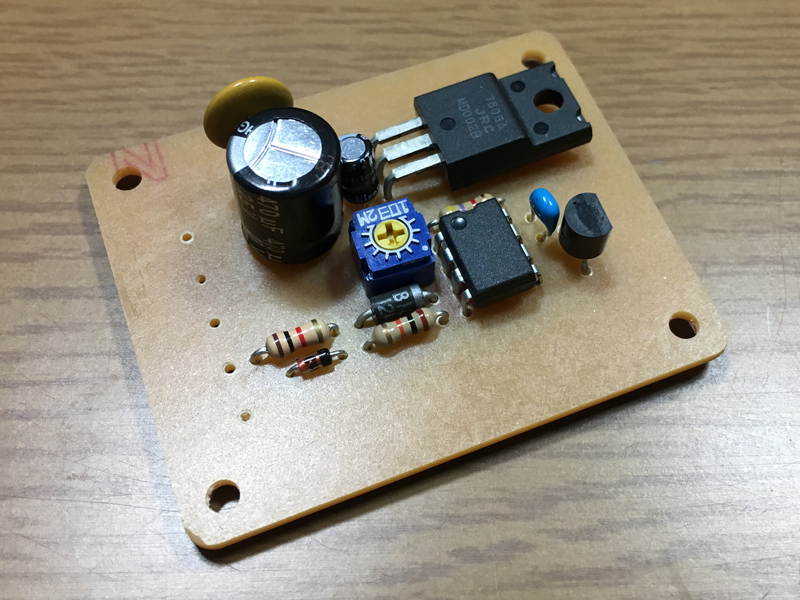
基板に部品を実装
- 部品を実装してみたものの、ユニバーサル基板を使用した場合とあまり変わらないサイズになってしまったということもあり、使用せずにそのままお蔵入りです。
長い間、自作パルスユニットを使用していたのですが、ふと、パルスユニットの新品はまだ購入できるのかと思い調べてみると、案の定販売停止になっていました。
eBayではまだ中古が出回っていたので、いつかは純正品に交換しようと思っていたし、なくなる前に確保しておこうと思って購入しました。
EPSのエラーによるアシスト停止はエンジン再起動後に適用されるため、EPSユニットに警告灯への配線とバックアップ電源を接続しないことで、警告灯は点灯せずエンジンキーをオフにする度にエラーが消去されるようにして対処する方法もあるようですが、できるだけ純正に近い状態を目指し、純正パルスユニットでの変換を最終仕様とすることにしました。
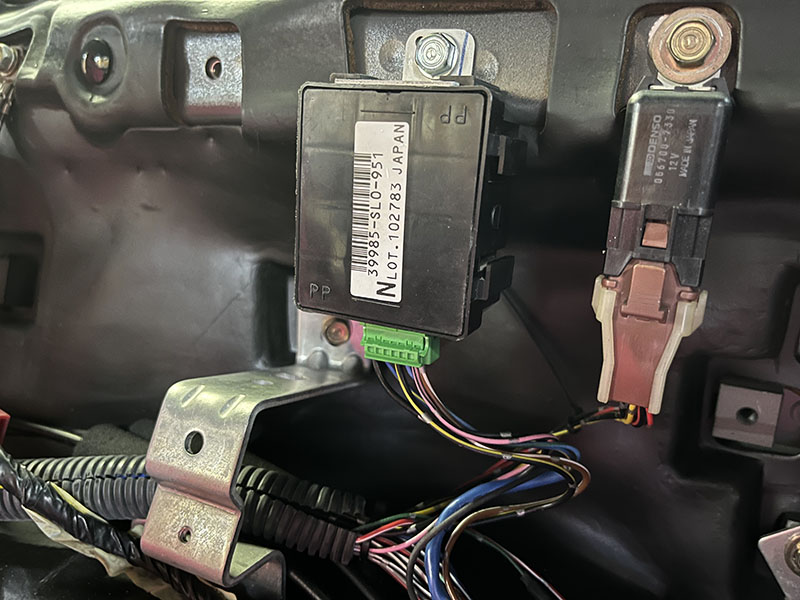
- 純正パルスユニットと購入したコネクタと端子。
パルスユニットはebayにてUS$78.85(※)で購入、コネクタと端子は 配線コムopen_in_new で購入しました。※ 本体US$57.85+送料US$21.00
PayPal支払いで12,282円(2025年3月18日購入)

純正パルスユニットと購入したコネクタ
| 名称 | 型式 | 単価 | 数量 | 価格 |
|---|---|---|---|---|
| JAE製025型IL-AG5シリーズ7極Fコネクタ | 7P025-IL-AG5-JAE-F-tropen_in_new | 230 | 1 | \230 |
| JAE製025型IL-AG5シリーズF端子 | F025-IL-AG5-JAEopen_in_new | 35 | 6 | \210 |
パルスユニット コネクタ加工完了
- コネクタ加工完了。
電源(黒/黄)とアース(黒)の配線径が太くコネクタに対して少しきつめですが、ぎりぎり差し込めました。 - 純正パルスユニットの取り付け完了。
本来どこに付いているのかは分かりませんが、もともとATコントロールユニットがあった場所の左上(燃料ポンプリレーの左横)に取り付けました。 - 取り外した自作パルスユニット。
過去の写真などから調べてみると、この自作パルスユニットは2013年8月から使用しており、2025年4月現在に至るまで11年8カ月の長期に渡って問題なく動き続けていました。
純正パルスユニットの取り付け完了

取り外した自作パルスユニット
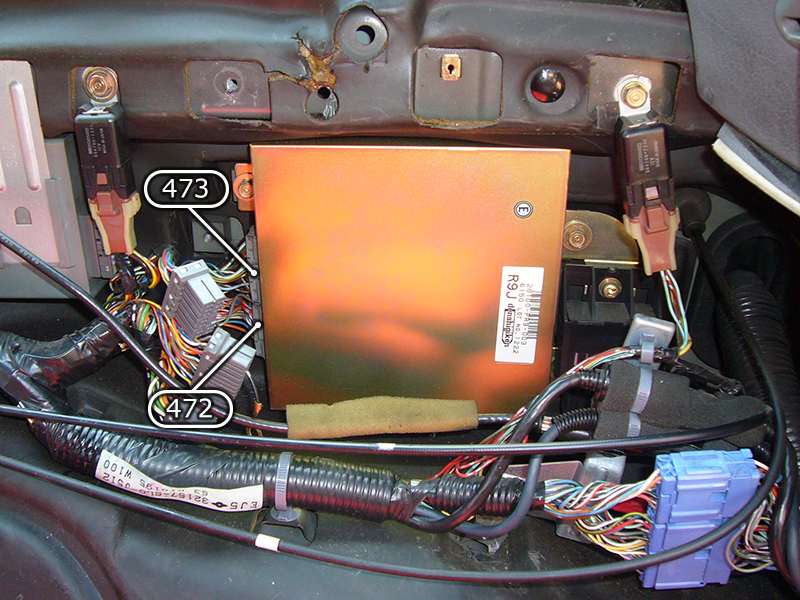
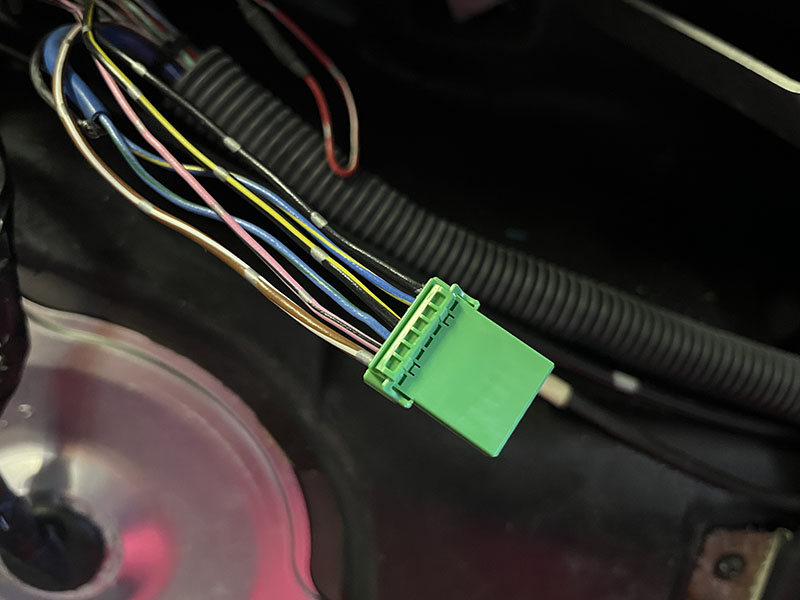
ATコントロールユニットのコネクタ
- ATコントロールユニットのコネクタ。
私の場合は、自作パルスユニットを取り付けていたため、配線は既に整理されていましたが、通常はATコントロールユニットに刺さっているコネクタの配線を加工することになります。 - 完全なMT仕様を目指してATコントロールユニットを取り外そうとする人が他にいるのか不明ですが、ATコントロールユニットから換装する場合を想定した配線図を作りました。
配線図の通りですが、ATコントロールユニットに刺さっている[[472]]と[[473]]のコネクタに含まれる配線だけを使用して純正パルスユニットに換装できます。
信号線はそのまま使用するしかないですが、電源線とアース線はパルスユニット用のコネクタに対して少し径が太いので、別のところから持ってきても構わないと思います。
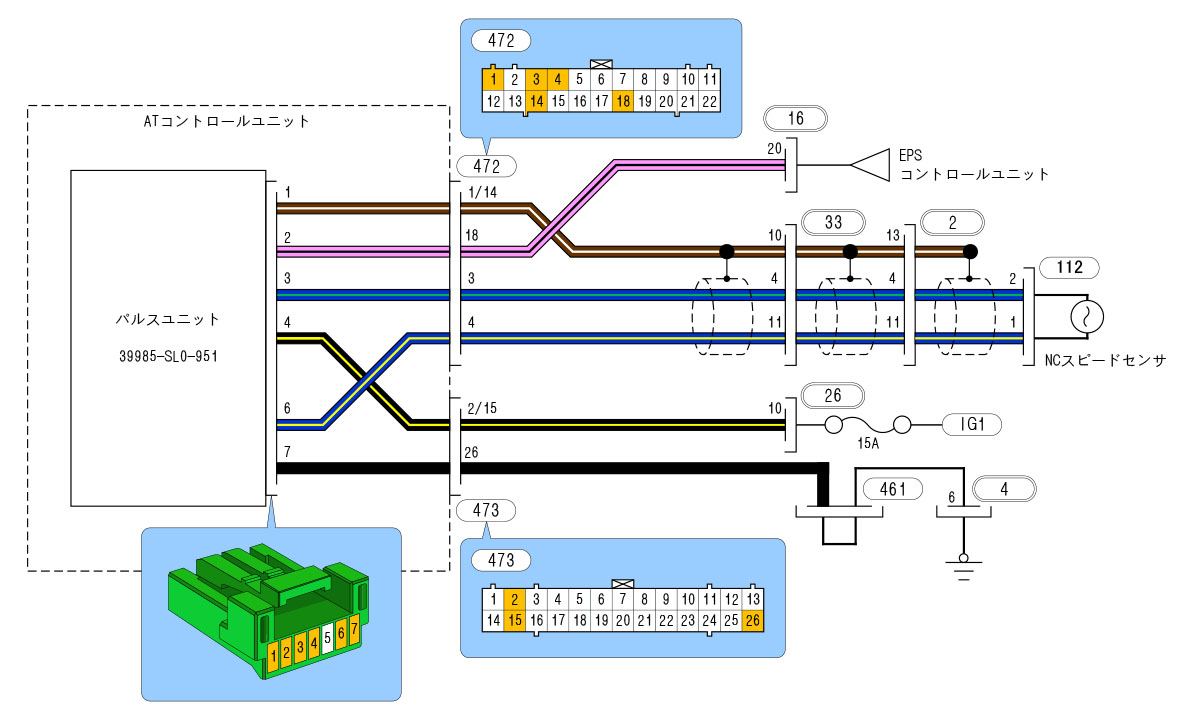
ATコントロールユニット→パルスユニット換装回路図